我研制出滑扑一体自主变形仿生柔体潜航器
发布时间:2019-08-07 23:53:04来源:

新华社西安8月5日电 (记者毛海峰 付瑞霞)随着人类对海洋资源的探索、开发和利用越发迫切,研究和发展仿生智能水下航行器成为近年来全球海洋科学领域的一大热点。日前,由西北工业大学研制的滑扑一体自主变形仿生柔体潜航器成功进行首航,标志着我国在高性能仿生智能水下航行器的研制方面迈出重要一步。
自主变形仿生柔体潜航器是科技部重点支持的研究项目,以蝠鲼为仿生原型,采用交替性滑翔与扑动的滑扑一体推进模式,在水中具有高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。
滑扑一体自主变形仿生柔体潜航器项目负责人、西北工业大学航海学院院长潘光对记者说,开展滑扑一体水下推进技术研究,使潜航器兼具水下航行器的高机动能力与水下滑翔机的长续航能力,可有效解决现阶段我国传统潜航器存在的机动性、隐蔽性和续航时间综合能力不足的问题。
这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的滑扑运动姿态。
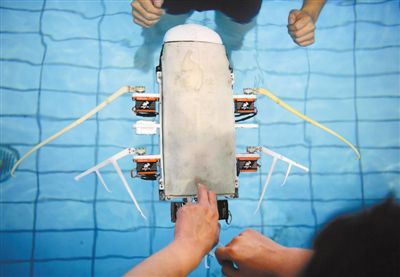
左图 原理验证样机在西北工业大学的游泳池内展示扑动前进(8月3日摄)。
右图 8月3日,西北工业大学研究团队的学生在调试原理验证样机的内部骨架。新华社记者 邵瑞摄
图说天下




最新消息
头条推荐
热门点击排行
图片报道








- 武汉六旬修钟人31年复活近200台古董座钟
- 专家:五花八门的鸡蛋 营养成分差别不大
- “七夕茶语 茶香溢喜” 北京世园会茶文化体验馆七夕特别活动
- 配米字旗尾灯 新款MINI CLUBMAN预售28.78万起
- 有望将于今年9月份正式上市 东南DX5官图发布
- 或于2020年正式对外销售 全新ALPINA B3谍照曝光
- 补贴后11.98万起 2019款帝豪GSe正式上市
- 预计将于明年发布 全新路虎揽胜骡车谍照曝光
- NEDC续航490km 曝北京现代菲斯塔纯电动部分参数
- 将于今年9月正式上市 东风风神奕炫预售7.49万起
- 《辐射:避难所Online》废土小贴士丨公会装饰物介绍
- 《辐射:避难所Online》SR英雄介绍-泽克
- 《三国志》官方七夕撒狗粮 神仙眷侣,只羡鸳鸯不羡仙
- 人类登月50周年 艺术家笔下千变万化的月
- 蔡明小品写手当电影导演 让岳云鹏变成“大英雄”
- 马克·吕布镜头下的东方世界
- 6件拍品10亿元 艺术品天价何来?
- 大师与杰作 | 经典杰作中的八位妖冶美女
- 故宫里究竟有多少种不同建筑?
- 那些惊艳眼球的美术馆
- 一份给摄影收藏爱好者的必备指南
- 《哪吒》票房破13亿!设计手稿首曝光
- 巴黎圣母院建筑竞赛中国建筑师夺冠 网友被别国设计戳中笑点
- 人类有望造访的六颗卫星藏着哪些秘密
- 中国卫通:模式创新助力高质量发展
- 仿生蝠鲼潜航器在西安研制成功
- 我研制出滑扑一体自主变形仿生柔体潜航器
- 数字经济成发展壮大新动能的重要力量
- 规模空前成果丰硕 2019世界机器人大赛总决赛圆满落幕
- 金蝶征信获2018年度深圳市金融创新奖
- 起步的5G,网速可能没你想得那么快
- 科研人员在西藏墨脱拍摄到野生孟加拉虎活体照片
- 耗电量超乎想象 “绿色计算”任重道远
- 2019年中国(北京)国际高新技术交流展洽会开幕
- 《95后恋爱报告》发布 7成以上愿意每年花2.4万谈恋爱
- 2019年意大利IMOLA陶瓷新品发布会盛大举行
- 用了这么多年的纸杯,你用对了吗?
- LED产业深度洗牌 强筋壮骨还需找准突破点
- 多家巨头涌入千亿互联网安全市场
- 当心!网络诈骗“盯”上大平台
- 运营商下调漫游费 随身WiFi会成为“全能旅伴”吗?
- 荣耀智慧屏发布在即 官方承诺永不设开关机广告